文章来源:
小肖
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至405936398@qq.com举报,一经查实,本站将立刻删除。
_理财保险_转赚网")
制作航模遥控器需要用到多按键检测,实现过程中主要参考了以下两篇文章,尤其是第一篇收获最大,作者的代码思想很好,但文中部分代码有误,实际运行时检测到的IO电平是错误的,花费了一天时间才调通,简单记录一下。
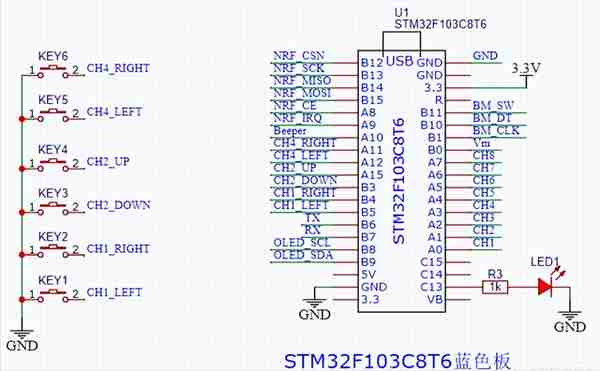
使用STM32F103C8T6蓝色板,按键采用共阴极连接。
6个按键:
CH1Left 接PB5
CH1Right 接PB4
CH2Up 接PA15
CH2Down 接PB3
CH4Left 接PA12
CH4Right 接PA11
串口USB-TTL接法:
GND 电源地
3V3 接3.3V
TXD 接PB7
RXD 接PB6
ST-LINK V2接法:
GND 电源地
3V3 接3.3V
SWCLK 接DCLK
SWDIO 接DIO
key.h - 主要定义结构体和函数预定义
#ifndef __KEY_H#define __KEY_H #include "stm32f10x.h"#include "stm32f10x_gpio.h" typedef struct // 构造按键初始化类{ GPIOMode_TypeDef GPIO_Mode; // 初始化按键模式 GPIO_TypeDef* GPIOx; // 初始化按键口 uint16_t GPIO_Pin_x; // 初始化按键引脚好 uint32_t RCC_APB2Periph_GPIOx; // 初始化时钟}Key_Init; typedef enum _KEY_STATUS_LIST // 按键状态{ KEY_NULL = 0x00, // 无动作 KEY_SURE = 0x01, // 确认状态 KEY_UP = 0x02, // 按键抬起 KEY_DOWN = 0x04, // 按键按下 KEY_LONG = 0x08, // 长按}KEY_STATUS_LIST; typedef struct _KEY_COMPONENTS // 状态机类{ FunctionalState KEY_SHIELD; //按键屏蔽,DISABLE(0):屏蔽,ENABLE(1):不屏蔽 uint8_t KEY_COUNT; //按键长按计数 BitAction KEY_LEVEL; //最终按键状态,按下Bit_SET(1),抬起Bit_RESET(0) BitAction KEY_DOWN_LEVEL; //按下时,按键IO实际的电平 KEY_STATUS_LIST KEY_STATUS; //按键状态 KEY_STATUS_LIST KEY_EVENT; //按键事件 BitAction (*READ_PIN)(Key_Init Key);//读IO电平函数}KEY_COMPONENTS; typedef struct // 按键类{ Key_Init Key; // 继承初始化父类 KEY_COMPONENTS Status; // 继承状态机父类}Key_Config; typedef enum // 按键注册表{ CH1Left, CH1Right, CH2Up, CH2Down, CH4Left, CH4Right,// 用户添加的按钮名称 KEY_NUM, // 必须要有的记录按钮数量,必须在最后}KEY_LIST; void KEY_Init(void);//IO初始化void Creat_Key(Key_Init* Init); // 初始化按钮函数void ReadKeyStatus(void); // 状态机函数void TIM3_Init(u16 arr,u16 psc);#endif原文中Key用的是指针,结果导致读电平函数GPIO_ReadInputDataBit()寻址错误,才使得读出的电平有误。
typedef struct // 按键类{ Key_Init *Key; // 继承初始化父类 KEY_COMPONENTS Status; // 继承状态机父类}Key_Config;key.c - TIM3定时器初始化,定时检测按键状态;有限状态机实现
#include "stm32f10x.h"#include "key.h"#include "sys.h" #include "delay.h"#include "usart.h" //参考链接https://blog.csdn.net/qq_42679566/article/details/105892105,原文错误已修正 Key_Config Key_Buf[KEY_NUM]; // 创建按键数组#define KEY_LONG_DOWN_DELAY 30 // 设置30个TIM3定时器中断=600ms算长按 #define DBGMCU_CR (*((volatile u32 *)0xE0042004)) /*通用定时器3中断初始化,使用TIM3控制按键定时检测 时钟选择为APB1的2倍,而APB1为36M* 参数:arr:自动重装值。 psc:时钟预分频数*/void TIM3_Init(u16 arr,u16 psc){ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能 TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载寄存器周期的值 TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //预分频值 TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; // 向上计数 TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分割为0,仍然使用72MHz TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);//允许更新中断 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure); NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//抢占优先级0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器 TIM_Cmd(TIM3,ENABLE);} void TIM3_IRQHandler(void) //TIM3中断{ if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否 { // 中断处理代码 ReadKeyStatus(); //调用状态机 u8 i,status; for(i = 0;i < KEY_NUM;i++) { status = Key_Buf[i].Status.KEY_EVENT; //if(status!=KEY_NULL) printf("%d,%d\n",i,status);//事件处理 if(status==KEY_DOWN) printf("%d短按\n",i); if(status==KEY_LONG) printf("%d长按\n",i); } TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除TIMx更新中断标志 }} //按键初始化函数void KEY_Init(void) //IO初始化{ Key_Init KeyInit[KEY_NUM]= { {GPIO_Mode_IPU, GPIOB, GPIO_Pin_5, RCC_APB2Periph_GPIOB}, // 初始化按键CH1Left {GPIO_Mode_IPU, GPIOB, GPIO_Pin_4, RCC_APB2Periph_GPIOB}, // 初始化按键CH1Right {GPIO_Mode_IPU, GPIOA, GPIO_Pin_15, RCC_APB2Periph_GPIOA}, // 初始化按键CH2Up {GPIO_Mode_IPU, GPIOB, GPIO_Pin_3, RCC_APB2Periph_GPIOB}, // 初始化按键CH2Down {GPIO_Mode_IPU, GPIOA, GPIO_Pin_12, RCC_APB2Periph_GPIOA}, // 初始化按键CH4Left {GPIO_Mode_IPU, GPIOA, GPIO_Pin_11, RCC_APB2Periph_GPIOA}, // 初始化按键CH4Right }; Creat_Key(KeyInit); // 调用按键初始化函数 //STM32没有彻底释放PB3作为普通IO口使用,切换到SW调试可释放PB3、PB4、PA15 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); DBGMCU_CR &=0xFFFFFFDF; //如果没有这段代码,PB3就会一直是低电平} static BitAction KEY_ReadPin(Key_Init Key) //按键读取函数{ return (BitAction)GPIO_ReadInputDataBit(Key.GPIOx,Key.GPIO_Pin_x);} void Creat_Key(Key_Init* Init){ uint8_t i; GPIO_InitTypeDef GPIO_InitStructure[KEY_NUM]; for(i = 0;i < KEY_NUM;i++) { Key_Buf[i].Key = Init[i]; // 按钮对象的初始化属性赋值 RCC_APB2PeriphClockCmd(Key_Buf[i].Key.RCC_APB2Periph_GPIOx, ENABLE);//使能相应时钟 GPIO_InitStructure[i].GPIO_Pin = Key_Buf[i].Key.GPIO_Pin_x; //设定引脚 GPIO_InitStructure[i].GPIO_Mode = Key_Buf[i].Key.GPIO_Mode; //设定模式 GPIO_Init(Key_Buf[i].Key.GPIOx, &GPIO_InitStructure[i]); //初始化引脚 // 初始化按钮对象的状态机属性 Key_Buf[i].Status.KEY_SHIELD = ENABLE; Key_Buf[i].Status.KEY_COUNT = 0; Key_Buf[i].Status.KEY_LEVEL = Bit_RESET; if(Key_Buf[i].Key.GPIO_Mode == GPIO_Mode_IPU) // 根据模式进行赋值 Key_Buf[i].Status.KEY_DOWN_LEVEL = Bit_RESET; else Key_Buf[i].Status.KEY_DOWN_LEVEL = Bit_SET; Key_Buf[i].Status.KEY_STATUS = KEY_NULL; Key_Buf[i].Status.KEY_EVENT = KEY_NULL; Key_Buf[i].Status.READ_PIN = KEY_ReadPin; //赋值按键读取函数 }} static void Get_Key_Level(void) // 根据实际按下按钮的电平去把它换算成虚拟的结果{ uint8_t i; for(i = 0;i < KEY_NUM;i++) { if(Key_Buf[i].Status.KEY_SHIELD == DISABLE) continue; if(Key_Buf[i].Status.READ_PIN(Key_Buf[i].Key) == Key_Buf[i].Status.KEY_DOWN_LEVEL) Key_Buf[i].Status.KEY_LEVEL = Bit_SET; else Key_Buf[i].Status.KEY_LEVEL = Bit_RESET; }} void ReadKeyStatus(void){ uint8_t i; Get_Key_Level(); for(i = 0;i < KEY_NUM;i++) { switch(Key_Buf[i].Status.KEY_STATUS) { //状态0:没有按键按下 case KEY_NULL: if(Key_Buf[i].Status.KEY_LEVEL == Bit_SET)//有按键按下 { Key_Buf[i].Status.KEY_STATUS = KEY_SURE;//转入状态1 Key_Buf[i].Status.KEY_EVENT = KEY_NULL;//空事件 } else { Key_Buf[i].Status.KEY_EVENT = KEY_NULL;//空事件 } break; //状态1:按键按下确认 case KEY_SURE: if(Key_Buf[i].Status.KEY_LEVEL == Bit_SET)//确认和上次相同 { Key_Buf[i].Status.KEY_STATUS = KEY_DOWN;//转入状态2 Key_Buf[i].Status.KEY_EVENT = KEY_DOWN;//按下事件 Key_Buf[i].Status.KEY_COUNT = 0;//计数器清零 } else { Key_Buf[i].Status.KEY_STATUS = KEY_NULL;//转入状态0 Key_Buf[i].Status.KEY_EVENT = KEY_NULL;//空事件 } break; //状态2:按键按下 case KEY_DOWN: if(Key_Buf[i].Status.KEY_LEVEL != Bit_SET)//按键释放,端口高电平 { Key_Buf[i].Status.KEY_STATUS = KEY_NULL;//转入状态0 Key_Buf[i].Status.KEY_EVENT = KEY_UP;//松开事件 } else if((Key_Buf[i].Status.KEY_LEVEL == Bit_SET) && (++Key_Buf[i].Status.KEY_COUNT >= KEY_LONG_DOWN_DELAY)) //超过KEY_LONG_DOWN_DELAY没有释放 { Key_Buf[i].Status.KEY_STATUS = KEY_LONG;//转入状态3 Key_Buf[i].Status.KEY_EVENT = KEY_LONG;//长按事件 Key_Buf[i].Status.KEY_COUNT = 0;//计数器清零 } else { Key_Buf[i].Status.KEY_EVENT = KEY_NULL;//空事件 } break; //状态3:按键连续按下 case KEY_LONG: if(Key_Buf[i].Status.KEY_LEVEL != Bit_SET)//按键释放,端口高电平 { Key_Buf[i].Status.KEY_STATUS = KEY_NULL;//转入状态0 Key_Buf[i].Status.KEY_EVENT = KEY_UP;//松开事件 } else if((Key_Buf[i].Status.KEY_LEVEL == Bit_SET) && (++Key_Buf[i].Status.KEY_COUNT >= KEY_LONG_DOWN_DELAY)) //超过KEY_LONG_DOWN_DELAY没有释放 { Key_Buf[i].Status.KEY_EVENT = KEY_LONG;//长按事件 Key_Buf[i].Status.KEY_COUNT = 0;//计数器清零 } else { Key_Buf[i].Status.KEY_EVENT = KEY_NULL;//空事件 } break; default: break; } }}main.c - 主函数调用TIM3初始化
#include "delay.h"#include "usart.h"#include "stm32f10x.h"#include "key.h"int main(){ delay_init();//初始化延时函数 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2,2位抢占优先级和2位子优先级 usart_init(115200);//初始化串口1,波特率为115200 TIM3_Init(19999,71);//1MHz,每20ms检测按键一次; KEY_Init(); //KEY初始化 while(1){ delay_ms(1); }}
")

")

")
")